详情
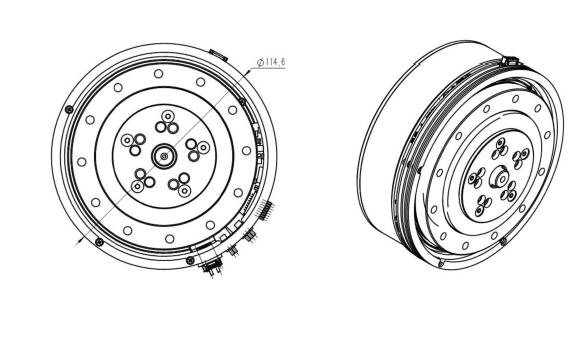
Product introduction of JA110 Joint
Module

1、 Product
features
Main features of joint module:
1. Compact structure: compact stator and rotor structure, built-in
encoder and driver;
2. Fast response: small moment of inertia, fast dynamic
response;
3. Precise control: low torque ripple, easy to speed control and
precise positioning;
4. Small and precise: the outer diameter is only 115mm, the large
and medium-sized empty wire holes, ultra light weight, effectively
ensuring
the reasonable self weight ratio of the robot;
5. Ready to use: it can be directly connected with the joint module
and the driving mechanical arm.
2、Application
scenario
The joint module can provide multiple degrees of freedom for
various machines. For example, bionic robot, cooperative robot,
welding robot, exoskeleton robot and other fields meet the needs of
different industries, such as industry, scientific research,
commerce, medical treatment, etc., with wide application, stable
quality and large shipment.
3、Parameter
Table
|
Serial number |
Model |
JA110 |
|
1 |
external
diameter mm |
115 |
|
2 |
length
mm |
49 |
|
3 |
weight
g |
1900 |
|
5 |
Reduction ratio |
37.1 |
|
6 |
Peak
torque Nm |
150 |
|
7 |
Continuous output torque Nm |
70 |
|
8 |
Motor
power W |
280 |
|
9 |
Rated
current A |
7.9 |
|
10 |
Power
supply voltage VDC |
36 |
|
11 |
Rated
speed rpm |
28.3 |
|
12 |
Maximum
speed |
36.3 |
|
13 |
Polar
logarithm |
21 |
|
15 |
Encoder
form |
Mutual
inductance encoder 4501 |
|
16 |
Repeated
positioning accuracy |
Less
than 4 minutes of arc |
|
17 |
Absolute
positioning accuracy |
±0.02° |
|
18 |
Resolving power |
8768 |
|
19 |
Brake
form |
Software
braking |
|
21 |
interface design |
Integrate |
The above parameters are for reference only. Our product technology
is constantly updated and upgraded. At the same time, we also
accept the customization and development of customers.
4、Product
Details
 5、Factory and
Qualification
5、Factory and
Qualification





